图片:
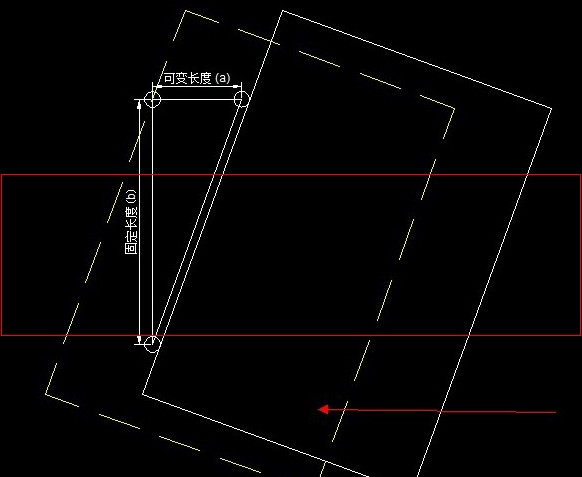
红色部分为带有粘性的胶带,胶带上粘有反射片,左右方向有个伺服可以左右移动,左右移动伺服上有个贴头把反射片吸住,上下移动来吸的动作也是一个伺服来控制,胶带是步进负责卷料使胶带带着反射片往左移动,因为反射片有两层膜。撕膜需要贴头压住反射片(因为片比较大,小的不用压)向左移动来撕膜,其中有其他结构不需深究这个问题。
问题在于反射片撕下膜后因位置不确定需要定位,这里的定位我们用到光纤感应反射片的边来计算角度,贴头上有个伺服可以旋转角度。上下偏移有其他方法解决,暂且谈让反射片垂直。
撕下膜后贴头将悬空,片在贴头上撕的过程中两个光纤先后感应到信号,此时我就记录伺服左右移动脉冲数,垂直距离是已知的,从而我们可以算出垂直方向与倾斜方向的角度。
需要旋转的角度就是这个角度,不知道这个方法是否行得通。
设备一起要七个轴。大家帮忙推荐下选型问题。
 沪公网安备31010802001143号
沪公网安备31010802001143号

