ͼƬ��
ͼƬ��
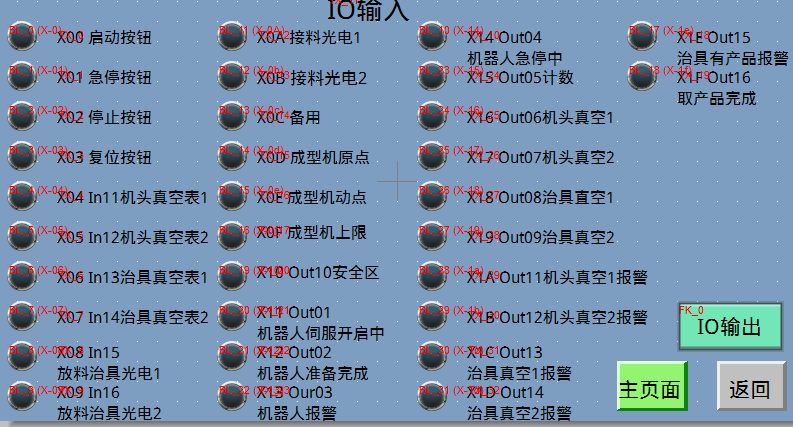
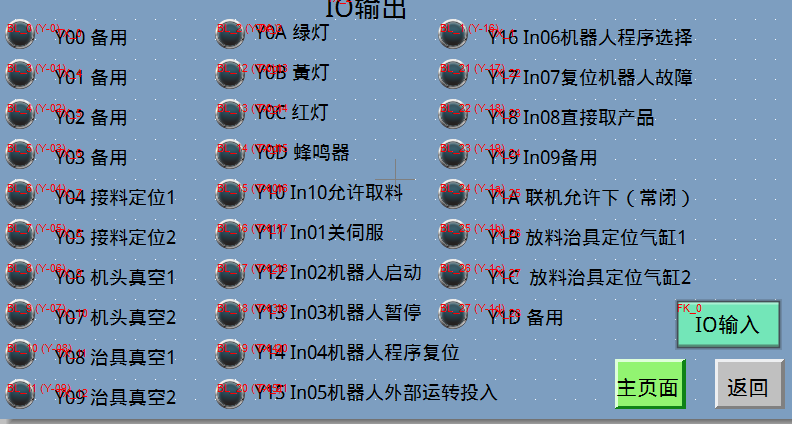
������ȡ�Ų�Ʒ����λ���Լ��ӹ�����ë�ߴ�ĥ��
��������⣬����˵���鲻̫�˽⣬
ALLCLR
*QUYU
GETP V101!
IF V102!>V170! THEN *A ELSE *B
*A
V103! = V171!
P555 = (V101!,V102!,V103!,V104!,V105!,V106!)
MOVEX A=8,AC=0,SM=0,M1X,L,P555,S= 600.0,H=1,MS
MOVEX A=1,AC=0,SM=0,M1X,L,(276.041,264.139,594.578,3.078,-2.797,-178.853),R= 100,H=1,MS, CONF=0000 'Yguodu
GOTO *C
*B
V103! = V103!+100
P555 = (V101!,V102!,V103!,V104!,V105!,V106!)
MOVEX A=8,AC=0,SM=0,M1X,L,P555,S= 600.0,H=1,MS
*C
MOVEX A=1,AC=0,SM=0,M1X,P,(225.023,0.633,594.503,3.078,-2.795,-178.865),R=50.0,H=1,MS, CONF=0010 'P88ԭ��
SETM O2,1 '�����������
*DAIJI
IF I10=1 THEN *QULIAO '����
GOTO *DAIJI
END
*QULIAO
SETM O10,1 '��������
DELAY 0.2
IF I08=1 THEN *ZHIJIEFAN 'ֱ�ӷ���
MOVEX A=1,AC=0,SM=0,M1X,L,(276.033,264.124,594.534,3.079,-2.797,-178.859),R=90.0,H=1,MS, CONF=0000 'P90����
*QUYI
 ����������31010802001143��
����������31010802001143��

