1:步进马达开机回原点
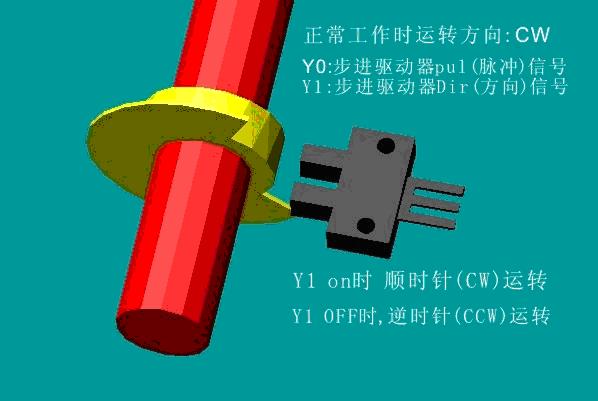
说明: 正常工作时的运行方向是:顺时针方向(CW)
Y0: 步进驱动器脉冲信号(PUL)
Y1: 步进驱动器方向信号(DIR)
Y1 ON时,顺时针(CW)运转
Y1 OFF时,逆时针(CCW)运转
X1 ON:光电传感器处于遮光状态
原点位置所示:
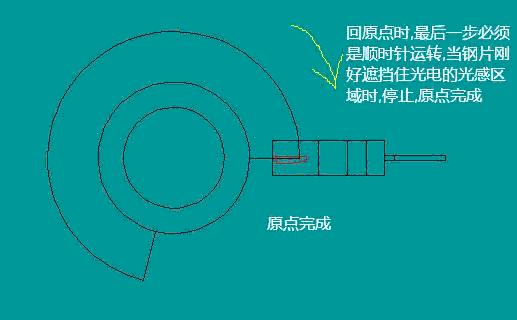
回原点时,最后一步必须是顺时针运转,当钢片刚好遮挡住光电的光感区域时,感应器输出信号,马达停止运转,原点完成。原点完成后运转方向不用变更,因为马达正常工作时也是顺时针运转
由于关闭电源后,可能由于一些外在因素,马达转过一定角度,这样就不在原点处,所以开机需对马达回原点
马达回原点时首先判断条件,分为两种,一种是光电处于遮光状态,即X1为ON,别一种是光电处于入光状态,X1为OFF,
如图:
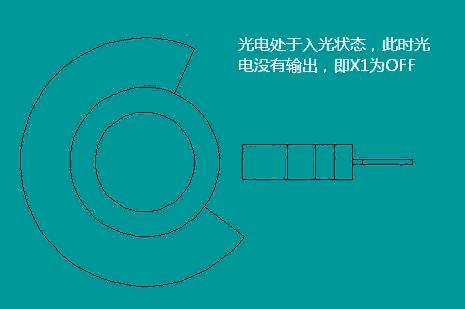
光电处于入光状态
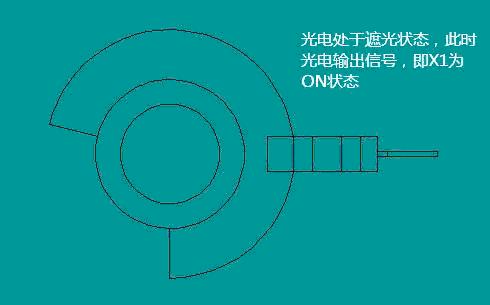
光电处于遮光状态
本人用的步进指令STL做的,感觉很笨,请教各位高手有什么其它好的方法,望分享经验!不胜感激!
 沪公网安备31010802001143号
沪公网安备31010802001143号

