伺服电机编码器相位与转子磁极相位零点如何对齐的问题
永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐
其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类直流特性”,这种控制方法也被称为磁场定向控制(FOC),达成FOC控制目标的外在表现就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示:
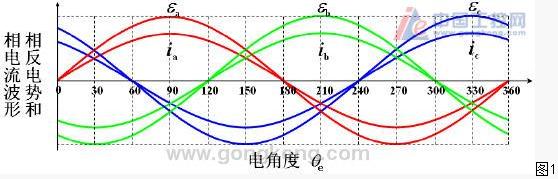
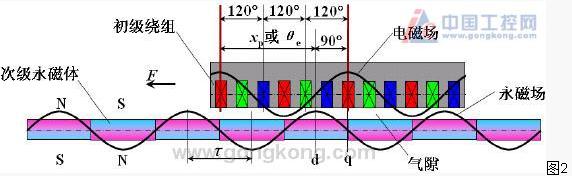
因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,就可以达成FOC控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90度电角度,如下图所示:
如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?由图1可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据此相位生成与反电势波形一致的正弦型相电流波形了,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系。
在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位。当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差0度相位的平衡位置上,如下图所示:
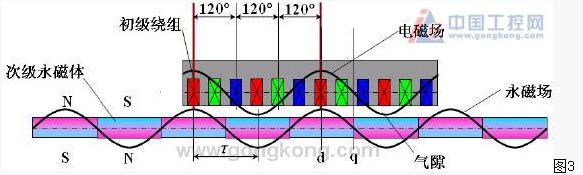
对比上面的图3和图2可见,虽然U相绕组(红色)的位置同处于电磁场波形的峰值中心(特定角度),但FOC控制下,U相中心与永磁体的q轴对齐,而空载定向时,U相中心却与d轴对齐,也就实现了a轴或α轴与d轴间的对齐关系,此时相位对齐到电角度0度,电机绕组中施加的转子定向电流的方向为U相入,VW出,由于V相与W相是并联关系,流经V相和W相的电流有可能出现不平衡,从而影响转子定向的准确性。
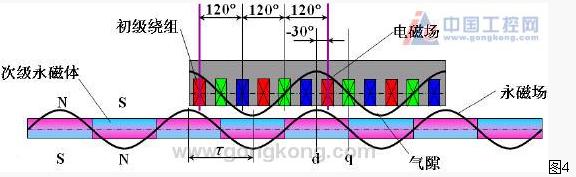
实用化的转子定向电流施加方法是U入,V出,即U相与V相串联,可获得幅值完全一致的U相和V相电流,有利于定向的准确性,此时U相绕组(红色)的位置与d轴差30度电角度,即a轴或α轴对齐到与d差(负)30度的电角度位置上,如图所示
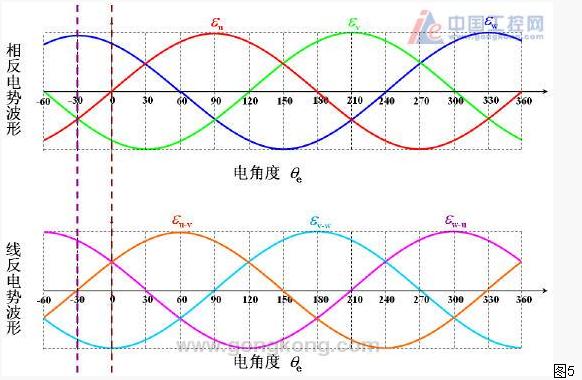
上述两种转子定向方法对应的绕组相反电势波形和线反电势,以及电角度的关系如下图所示,棕色线为a轴或α轴与d轴对齐,即直接对齐到电角度0点,紫色线为a轴或α轴对齐到与d差(负)30度的电角度位置,即对齐到-30度电角度点:
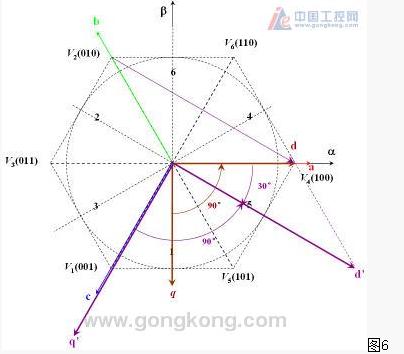
d、q轴矢量与a、b、c轴或α、β轴之间的角度的关系如下图所示,棕色线d轴与a轴或α轴对齐,即直接对齐到电角度0点,紫色线为d‘轴与a轴或α轴相差30度,即对齐到-30度电角度点:
 增量式编码器的相位对齐方式
增量式编码器的相位对齐方式 在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.用示波器观察编码器的U相信号和Z信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:
1.用示波器观察编码器的U相信号和电机的UV线反电势波形;
2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;
4.一边调整,一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点,最终使上升沿和过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
由于普通增量式编码器不具备UVW相位信息,而Z信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而不作为本讨论的话题。
绝对式编码器的相位对齐方式 绝对式编码器的相位对齐对于单圈和多圈而言,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。早期的绝对式编码器会以单独的引脚给出单圈相位的最高位的电平,利用此电平的0和1的翻转,也可以实现编码器和电机的相位对齐,方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.用示波器观察绝对编码器的最高计数位电平信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察最高计数位信号的跳变沿,直到跳变沿准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,跳变沿都能准确复现,则对齐有效。
这类绝对式编码器目前已经被采用EnDAT,BiSS,Hyperface等串行协议,以及日系专用串行协议的新型绝对式编码器广泛取代,因而最高位信号就不符存在了,此时对齐编码器和电机相位的方法也有所变化,其中一种非常实用的方法是利用编码器内部的EEPROM,存储编码器随机安装在电机轴上后实测的相位,具体方法如下:
1.将编码器随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取绝对编码器的单圈位置值,并存入编码器内部记录电机电角度初始相位的EEPROM中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的编码器内部EEPROM中的位置检测值就对应电机电角度的-30度相位。此后,驱动器将任意时刻的单圈位置检测数据与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要编码器和伺服驱动器的支持和配合方能实现,日系伺服的编码器相位之所以不便于最终用户直接调整的根本原因就在于不肯向用户提供这种对齐方式的功能界面和操作方法。这种对齐方法的一大好处是,只需向电机绕组提供确定相序和方向的转子定向电流,无需调整编码器和电机轴之间的角度关系,因而编码器可以以任意初始角度直接安装在电机上,且无需精细,甚至简单的调整过程,操作简单,工艺性好。
如果绝对式编码器既没有可供使用的EEPROM,又没有可供检测的最高计数位引脚,则对齐方法会相对复杂。如果驱动器支持单圈绝对位置信息的读出和显示,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示绝对编码器的单圈位置值;
3.调整编码器转轴与电机轴的相对位置;
4.经过上述调整,使显示的单圈绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的单圈绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算位置点都能准确复现,则对齐有效。
如果用户连绝对值信息都无法获得,那么就只能借助原厂的专用工装,一边检测绝对位置检测值,一边检测电机电角度相位,利用工装,调整编码器和电机的相对角位置关系,将编码器相位与电机电角度相位相互对齐,然后再锁定。这样一来,用户就更加无从自行解决编码器的相位对齐问题了。
个人推荐采用在EEPROM中存储初始安装位置的方法,简单,实用,适应性好,便于向用户开放,以便用户自行安装编码器,并完成电机电角度的相位整定。
正余弦编码器的相位对齐方式 普通的正余弦编码器具备一对正交的sin,cos 1Vp-p信号,相当于方波信号的增量式编码器的AB正交信号,每圈会重复许许多多个信号周期,比如2048等;以及一个窄幅的对称三角波Index信号,相当于增量式编码器的Z信号,一圈一般出现一个;这种正余弦编码器实质上也是一种增量式编码器。另一种正余弦编码器除了具备上述正交的sin、cos信号外,还具备一对一圈只出现一个信号周期的相互正交的1Vp-p的正弦型C、D信号,如果以C信号为sin,则D信号为cos,通过sin、cos信号的高倍率细分技术,不仅可以使正余弦编码器获得比原始信号周期更为细密的名义检测分辨率,比如2048线的正余弦编码器经2048细分后,就可以达到每转400多万线的名义检测分辨率,当前很多欧美伺服厂家都提供这类高分辨率的伺服系统,而国内厂家尚不多见;此外带C、D信号的正余弦编码器的C、D信号经过细分后,还可以提供较高的每转绝对位置信息,比如每转2048个绝对位置,因此带C、D信号的正余弦编码器可以视作一种模拟式的单圈绝对编码器。
采用这种编码器的伺服电机的初始电角度相位对齐方式如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.用示波器观察正余弦编码器的C信号波形;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察C信号波形,直到由低到高的过零点准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,过零点都能准确复现,则对齐有效。
撤掉直流电源后,验证如下:
1.用示波器观察编码器的C相信号和电机的UV线反电势波形;
2.转动电机轴,编码器的C相信号由低到高的过零点与电机的UV线反电势波形由低到高的过零点重合。
这种验证方法,也可以用作对齐方法。
此时C信号的过零点与电机电角度相位的-30度点对齐。
如果想直接和电机电角度的0度点对齐,可以考虑:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察编码器的C相信号由低到高的过零点和电机U相反电势波形由低到高的过零点,最终使2个过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
由于普通正余弦编码器不具备一圈之内的相位信息,而Index信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而在此也不作为讨论的话题。
如果可接入正余弦编码器的伺服驱动器能够为用户提供从C、D中获取的单圈绝对位置信息,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示从C、D信号中获取的单圈绝对位置信息;
3.调整旋变轴与电机轴的相对位置;
4.经过上述调整,使显示的绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算绝对位置点都能准确复现,则对齐有效。
此后可以在撤掉直流电源后,得到与前面基本相同的对齐验证效果:
1.用示波器观察正余弦编码器的C相信号和电机的UV线反电势波形;
2.转动电机轴,验证编码器的C相信号由低到高的过零点与电机的UV线反电势波形由低到高的过零点重合。
如果利用驱动器内部的EEPROM等非易失性存储器,也可以存储正余弦编码器随机安装在电机轴上后实测的相位,具体方法如下:
1.将正余弦随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取由C、D信号解析出来的单圈绝对位置值,并存入驱动器内部记录电机电角度初始安装相位的EEPROM等非易失性存储器中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的驱动器内部EEPROM等非易失性存储器中的位置检测值就对应电机电角度的-30度相位。此后,驱动器将任意时刻由编码器解析出来的与电角度相关的单圈绝对位置值与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要伺服驱动器的在国内和操作上予以支持和配合方能实现,而且由于记录电机电角度初始相位的EEPROM等非易失性存储器位于伺服驱动器中,因此一旦对齐后,电机就和驱动器事实上绑定了,如果需要更换电机、正余弦编码器、或者驱动器,都需要重新进行初始安装相位的对齐操作,并重新绑定电机和驱动器的配套关系。
旋转变压器的相位对齐方式 旋转变压器简称旋变,是由经过特殊电磁设计的高性能硅钢叠片和漆包线构成的,相比于采用光电技术的编码器而言,具有耐热,耐振。耐冲击,耐油污,甚至耐腐蚀等恶劣工作环境的适应能力,因而为武器系统等工况恶劣的应用广泛采用,一对极(单速)的旋变可以视作一种单圈绝对式反馈系统,应用也最为广泛,因而在此仅以单速旋变为讨论对象,多速旋变与伺服电机配套,个人认为其极对数最好采用电机极对数的约数,一便于电机度的对应和极对数分解。
旋变的信号引线一般为6根,分为3组,分别对应一个激励线圈,和2个正交的感应线圈,激励线圈接受输入的正弦型激励信号,感应线圈依据旋变转定子的相互角位置关系,感应出来具有SIN和COS包络的检测信号。旋变SIN和COS输出信号是根据转定子之间的角度对激励正弦信号的调制结果,如果激励信号是sinωt,转定子之间的角度为θ,则SIN信号为sinωt×sinθ,则COS信号为sinωt×cosθ,根据SIN,COS信号和原始的激励信号,通过必要的检测电路,就可以获得较高分辨率的位置检测结果,目前商用旋变系统的检测分辨率可以达到每圈2的12次方,即4096,而科学研究和航空航天系统甚至可以达到2的20次方以上,不过体积和成本也都非常可观。
商用旋变与伺服电机电角度相位的对齐方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出;
2.然后用示波器观察旋变的SIN线圈的信号引线输出;
3.依据操作的方便程度,调整电机轴上的旋变转子与电机轴的相对位置,或者旋变定子与电机外壳的相对位置;
4.一边调整,一边观察旋变SIN信号的包络,一直调整到信号包络的幅值完全归零,锁定旋变;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,信号包络的幅值过零点都能准确复现,则对齐有效 。
撤掉直流电源,进行对齐验证:
1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;
2.转动电机轴,验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合。
这个验证方法,也可以用作对齐方法。
此时SIN信号包络的过零点与电机电角度相位的-30度点对齐。
如果想直接和电机电角度的0度点对齐,可以考虑:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;
4.一边调整,一边观察旋变的SIN信号包络的过零点和电机U相反电势波形由低到高的过零点,最终使这2个过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
需要指出的是,在上述操作中需有效区分旋变的SIN包络信号中的正半周和负半周。由于SIN信号是以转定子之间的角度为θ的sinθ值对激励信号的调制结果,因而与sinθ的正半周对应的SIN信号包络中,被调制的激励信号与原始激励信号同相,而与sinθ的负半周对应的SIN信号包络中,被调制的激励信号与原始激励信号反相,据此可以区别判断旋变输出的SIN包络信号波形中的正半周和负半周,对齐时,需要取sinθ由负半周向正半周过渡点对应的SIN包络信号的过零点,如果取反了,或者未加准确判断的话,对齐后的电角度有可能错位180度,从而有可能造成速度外环进入正反馈。
如果可接入旋变的伺服驱动器能够为用户提供从旋变信号中获取的与电机电角度相关的绝对位置信息,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示从旋变信号中获取的与电机电角度相关的绝对位置信息;
3.依据操作的方便程度,调整旋变轴与电机轴的相对位置,或者旋变外壳与电机外壳的相对位置;
4.经过上述调整,使显示的绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算绝对位置点都能准确复现,则对齐有效。
此后可以在撤掉直流电源后,得到与前面基本相同的对齐验证效果:
1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;
2.转动电机轴,验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合。
如果利用驱动器内部的EEPROM等非易失性存储器,也可以存储旋变随机安装在电机轴上后实测的相位,具体方法如下:
1.将旋变随机安装在电机上,即固结旋变转轴与电机轴,以及旋变外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取由旋变解析出来的与电角度相关的绝对位置值,并存入驱动器内部记录电机电角度初始安装相位的EEPROM等非易失性存储器中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的驱动器内部EEPROM等非易失性存储器中的位置检测值就对应电机电角度的-30度相位。此后,驱动器将任意时刻由旋变解析出来的与电角度相关的绝对位置值与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要伺服驱动器的在国内和操作上予以支持和配合方能实现,而且由于记录电机电角度初始相位的EEPROM等非易失性存储器位于伺服驱动器中,因此一旦对齐后,电机就和驱动器事实上绑定了,如果需要更换电机、旋变、或者驱动器,都需要重新进行初始安装相位的对齐操作,并重新绑定电机和驱动器的配套关系。
注意
1.以上讨论中,所谓对齐到电机电角度的-30度相位的提法,是以UV反电势波形滞后于U相30度的前提为条件。
2.以上讨论中,都以UV相通电,并参考UV线反电势波形为例,有些伺服系统的对齐方式可能会采用UW相通电并参考UW线反电势波形。
3.如果想直接对齐到电机电角度0度相位点,也可以将U相接入低压直流源的正极,将V相和W相并联后接入直流源的负端,此时电机轴的定向角相对于UV相串联通电的方式会偏移30度,以文中给出的相应对齐方法对齐后,原则上将对齐于电机电角度的0度相位,而不再有-30度的偏移量。这样做看似有好处,但是考虑电机绕组的参数不一致性,V相和W相并联后,分别流经V相和W相绕组的电流很可能并不一致,从而会影响电机轴定向角度的准确性。而在UV相通电时,U相和V相绕组为单纯的串联关系,因此流经U相和V相绕组的电流必然是一致的,电机轴定向角度的准确性不会受到绕组定向电流的影响。
4.不排除伺服厂商有意将初始相位错位对齐的可能性,尤其是在可以提供绝对位置数据的反馈系统中,初始相位的错位对齐将很容易被数据的偏置量补偿回来,以此种方式也许可以起到某种保护自己产品线的作用。只是这样一来,用户就更加无从知道伺服电机反馈元件的初始相位到底该对齐到哪儿了。用户自然也不愿意遇到这样的供应商。
电角度相位对齐的基本方法总结 1.波形观察法
适用于带换相信号的增量式编码器、正余弦编码、旋转变压器。
1) 以示波器直接观察UV线反电势波形过零点与传感器的U相信号上升沿/Z信号、或Sin信号过零点、或Sin包络信号过零点的相位对齐关系,以此方法可以将传感器的上述信号边沿或过零点对齐到-30度电角度相位;
2) 以阻值范围适当的三个等值电阻构成星形,接入永磁伺服电机的UVW动力线,以示波器观察U相动力线与星形等值电阻的中心点之间的虚拟U相反电势波形与与传感器的U相信号上升沿/Z信号、或Sin信号过零点、或Sin包络信号过零点的相位对齐关系,以此方法可以将传感器的上述信号边沿或过零点对齐到电角度相位0点;
2.转子定向法
适用于带换相信号的增量式编码器、正余弦编码、旋转变压器的波形对齐,或者绝对式编码器和正余弦编码、旋转变压器等按可提供单圈绝对位置数值信息对齐。
1) 将U相接入低压直流源的正极,V相接入直流源的负端,定向电机轴
此后一边调整传感器与电机的相对位置关系,一边以示波器观察传感器信号,直到U相信号上升沿/Z信号、或Sin信号过零点、或Sin包络信号过零点准确复现,以此方法可以将传感器的上述信号边沿或过零点对齐到 -30度电角度相位;
也可以一边调整传感器与电机的相对位置关系,一边设法观察单圈绝对位置的数值信息,直到数据零位准确复现,以此方法也可以将传感器的单圈绝对位置零点对齐到 -30度电角度相位;
如果事先估算出 -30度电角度对应的单圈绝对位置的数值,还可以调整传感器与电机的相对位置关系,直到该数值准确复现,就可以将单圈绝对位置零点直接对齐到电角度相位0点(该方法可能比将在下一面 2) 中总结的后一条方法精确度更好一些);
当然也完全可以不调整传感器与电机的相对位置关系,而是简单地随机安装编码器,把读取到的单圈绝对位置信息作为初始安装的偏置值,通过后续运算,实现单圈绝对位置信息和电角度相位零点的逻辑对齐,该方法的人工操作要求最低。
2) 将U相接入低压直流源的正极,将V相和W相并联后接入直流源的负端,定向电机轴
此后一边调整传感器与电机的相对位置关系,一边以示波器观察传感器信号,直到U相信号上升沿/Z信号、或Sin信号过零点、或Sin包络信号过零点准确复现,以此方法可以将传感器的上述信号边沿或过零点对齐到电角度相位0点;
也可以一边调整传感器与电机的相对位置关系,一边设法观察单圈绝对位置的数值信息,直到数据零位准确复现,以此方法也可以将传感器的上述信号边沿或过零点对齐到电角度相位0点。
[ 此帖被王锐在2009-01-31 19:30重新编辑 ]
 沪公网安备31010802001143号
沪公网安备31010802001143号

