图片:
图片:
图片:
图片:
图片:
图片:
图片:
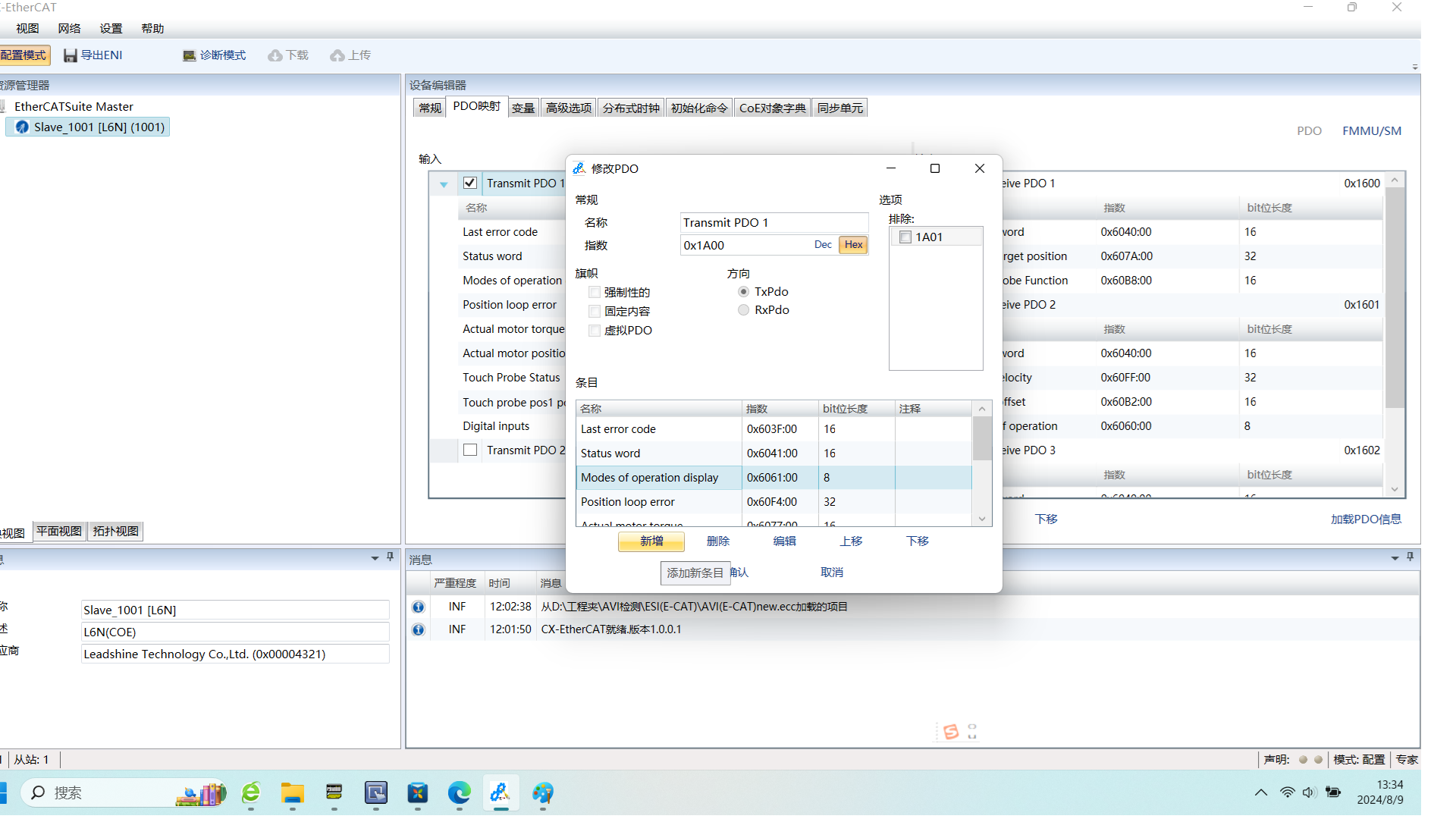
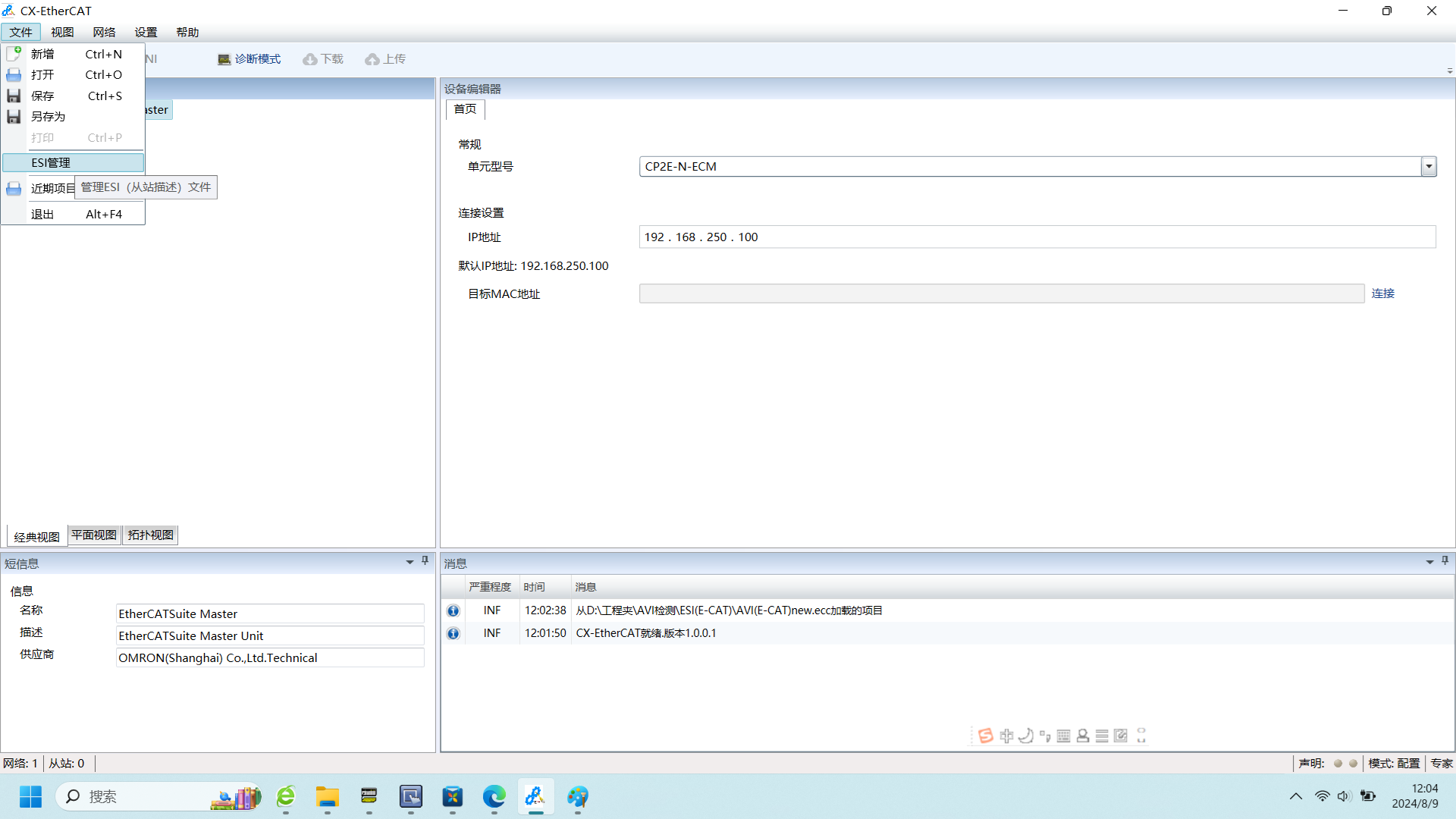
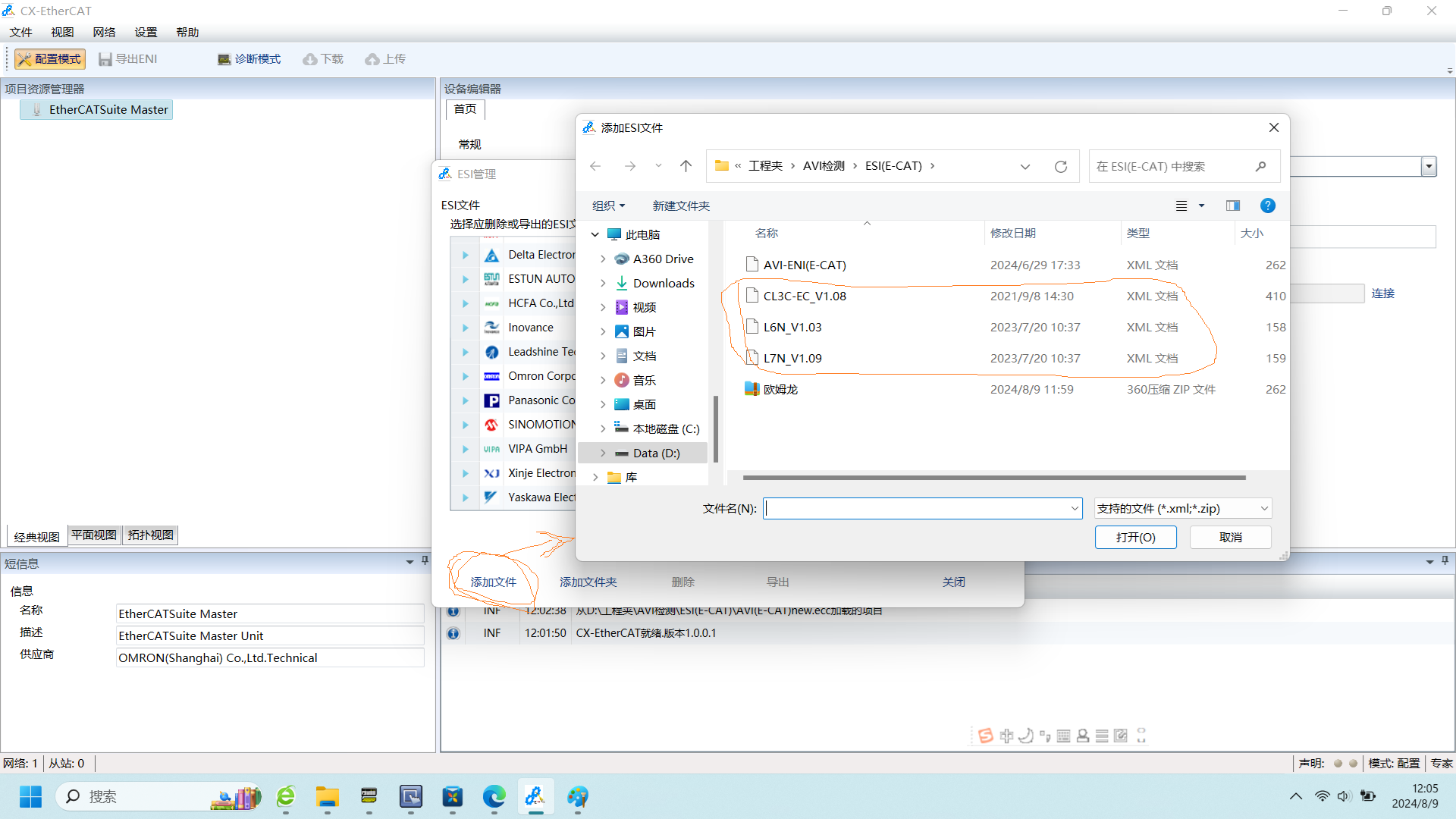
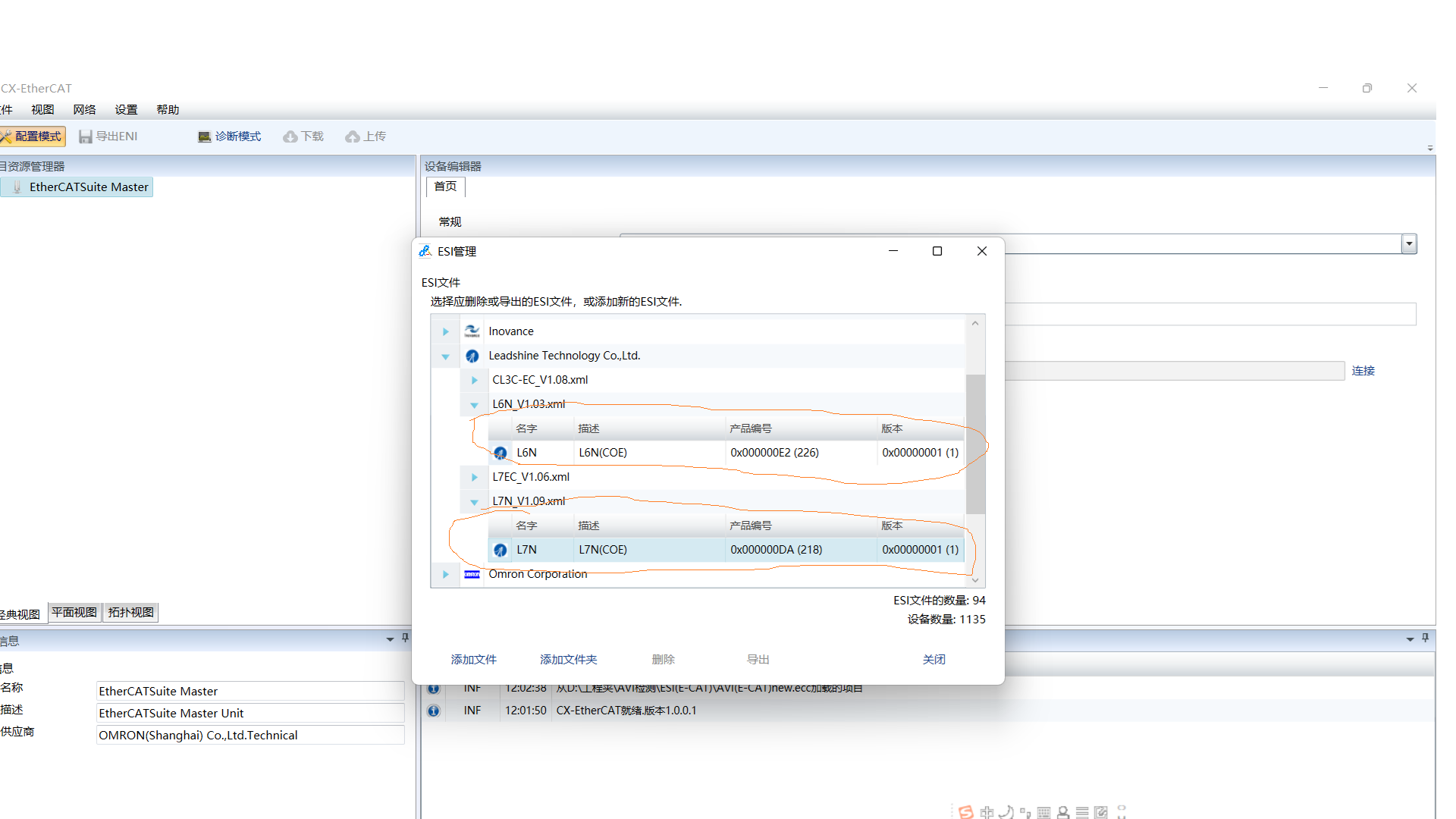
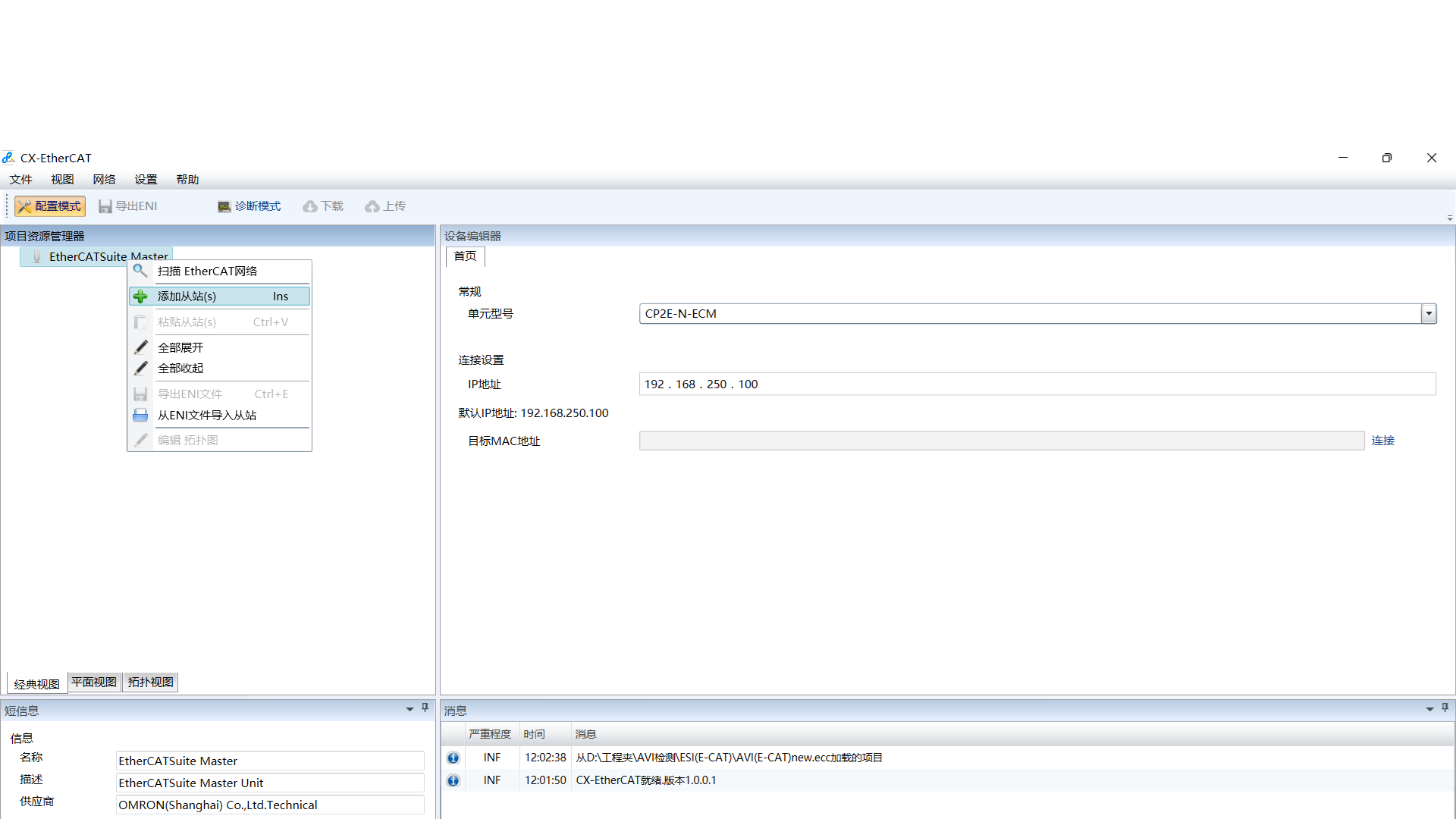
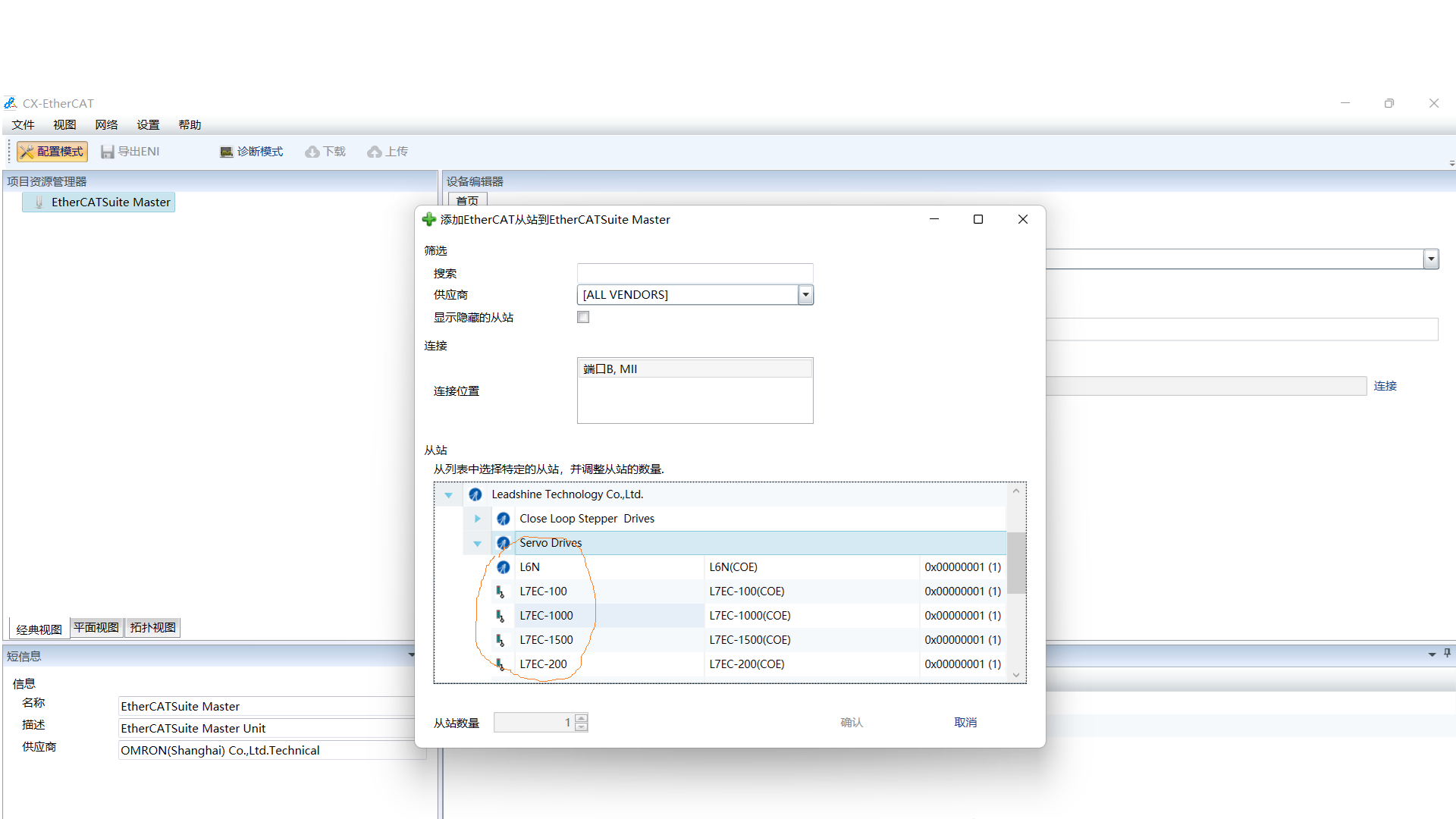
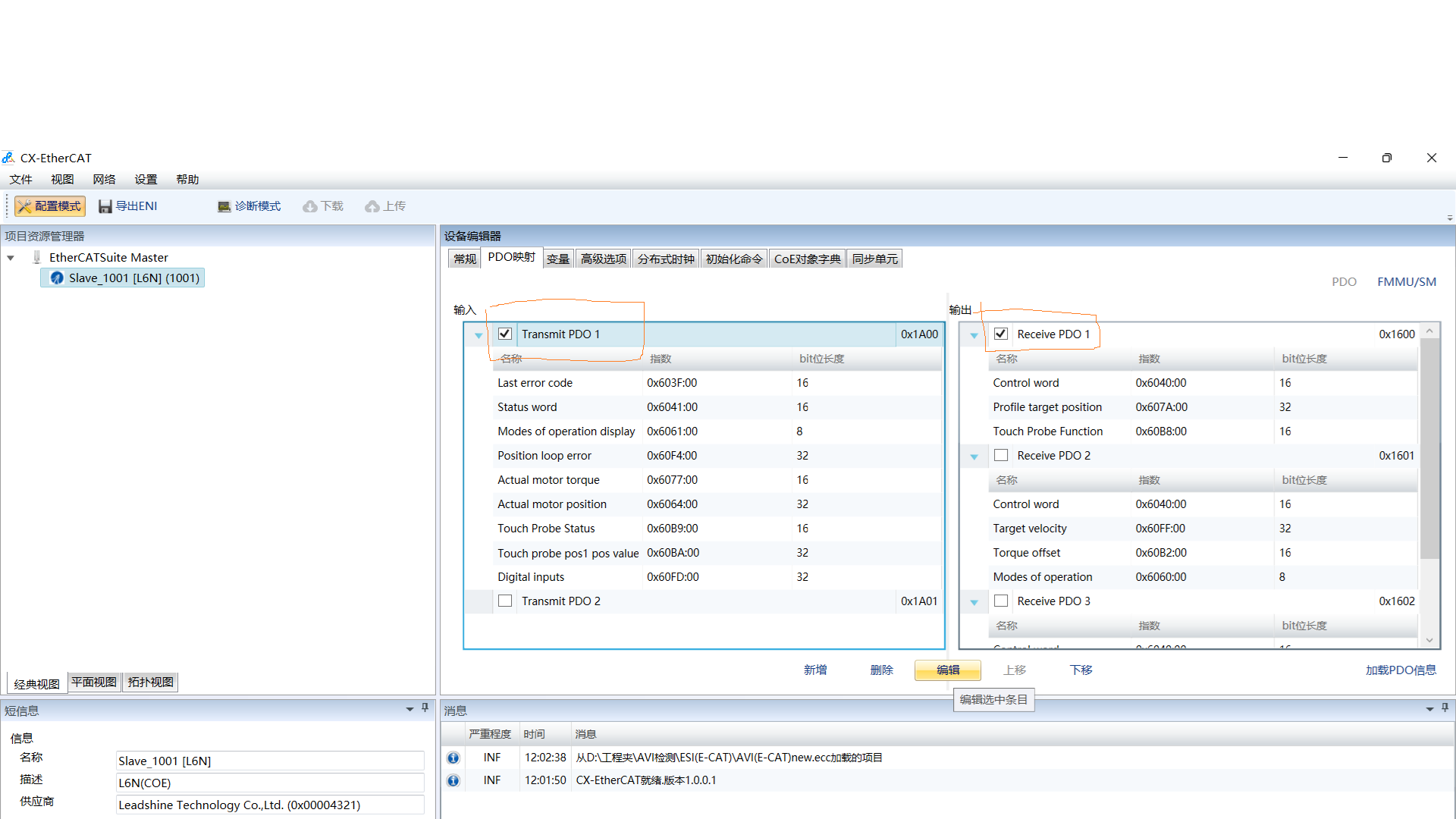
耽搁好久,又弄了其他杂事,目前有个基本版本出来了。程序中包含CP2E的总线伺服步进驱动,以及上位机的通讯程序,目前算是初版,大家将就着看一下。CAT通讯首先去伺服厂商官网下载对应型号的《描述性文件》,文件格式为XML格式,然后用CX-EtherCAT通讯软件添加上去。然后新建从站,并配置需要的地址表。最后下载进PLC后,断电2-3分钟(较长一段时间)。程序和总线配置见文件。程序中需要注意的有3点:第一,程序中的寄存器一定仔细检查和地址表要对应;第二目前欧姆龙官网上的伺服定位控制功能块对应不同厂家的伺服可能会有响应延迟,我用的雷赛的会延迟1秒多,查了好久,最后从地方销售商的客服手上拿到不一样的版本功能块才解决了这个问题;第三,参照说明书中的地址区间,W124-W126一定不能占用,不然功能块会报错,这个也是查了好久。最后的上位机通讯部分借鉴了站内视频作者 guanyumou的【欧姆龙CP2E-N实现Modbus TCP\RTU\ASCII\Socket通信协议视频教程】,作者讲解还是比较详细的,我这边将说明书的注解加入到程序中供大家更方便阅读。
 沪公网安备31010802001143号
沪公网安备31010802001143号

