图片:
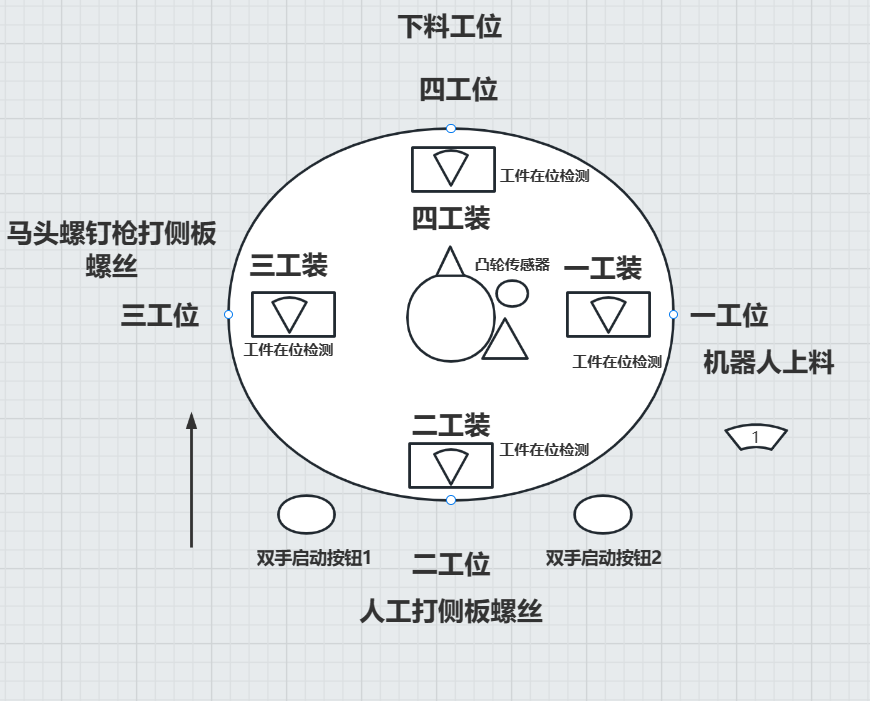
接到一个四工位转台的案子,硬件用的西门子1200 1215C 转台用的分割器 台湾野人厂家, 传感器用了两个 ,一个是转台凸轮 上的检测传感器,外加一个检测工作台第一工装的一个传感器 。四个工装上分别装了四个在位检测传感器。
控制工艺是 :
1工位上料,机器人上料完成后 ,1工位光电检测到信号后,机器人发出 一工位夹紧气缸夹紧,机器人离开干涉区后,工位一完成信号 ON
2工位 按下双手启动按钮,人工打螺丝4个,打完以后, 等到3 4 工位 完成信号,1工位上料完成信号,此时转台转一圈 工件到三工位
3工位,马头枪 开始打3个螺丝,打完后,发出3工位完成信号,等待其他工位 完成信号以后, 在按下双手启动按钮,转盘到4工位
4工位 下料, 转盘移动到四工位,检测有料后,搬运模组进行下料。下料完成后,再双手启动 开始下一个循环
现在碰到三个问题:
1. 开机第一次 复位设备动作以后,我把3 4 工位赋值 工位完成信号,转到自动模式,上料以后 ,转盘一转盘 我就把工位完成信号复位掉,这 就造成 我只能转到一次,这个信号该如何取?
2. 每次转盘一直在转动, 上料位置,机器人需要判断这是第几个工装夹紧,这样才能控制对应的夹紧气缸进行夹紧
3. 下料工位, 每次下料的时候 我也是需要判断 当前是第几个工装,用来松开对应的工装夹紧气缸,,
我用的ROL 移位指令 MB10, 第一次转盘回到原位后,M10.0=ON, 当前为第一个工装,转盘一转动, 移位一次, M10.0-OFF M10.1=ON, 现在工装在 转台的工位二位置,在转盘转一圈,移位一次,M10.1=OFF M10.2=ON, 此时是3 工位,转盘再转一圈 ,此时移位一次 到四工位 M10.3=ON,M10.2=OFF, 此时在把 MB10赋值=1, 从新开始循环
现在就卡在上面三个问题上了 第一 开机复位以后,3 4 工位取什么信号合适,在进行转盘 移动 第二 上料位的工装判断,,,第三 下料位的工装判断,
 沪公网安备31010802001143号
沪公网安备31010802001143号

