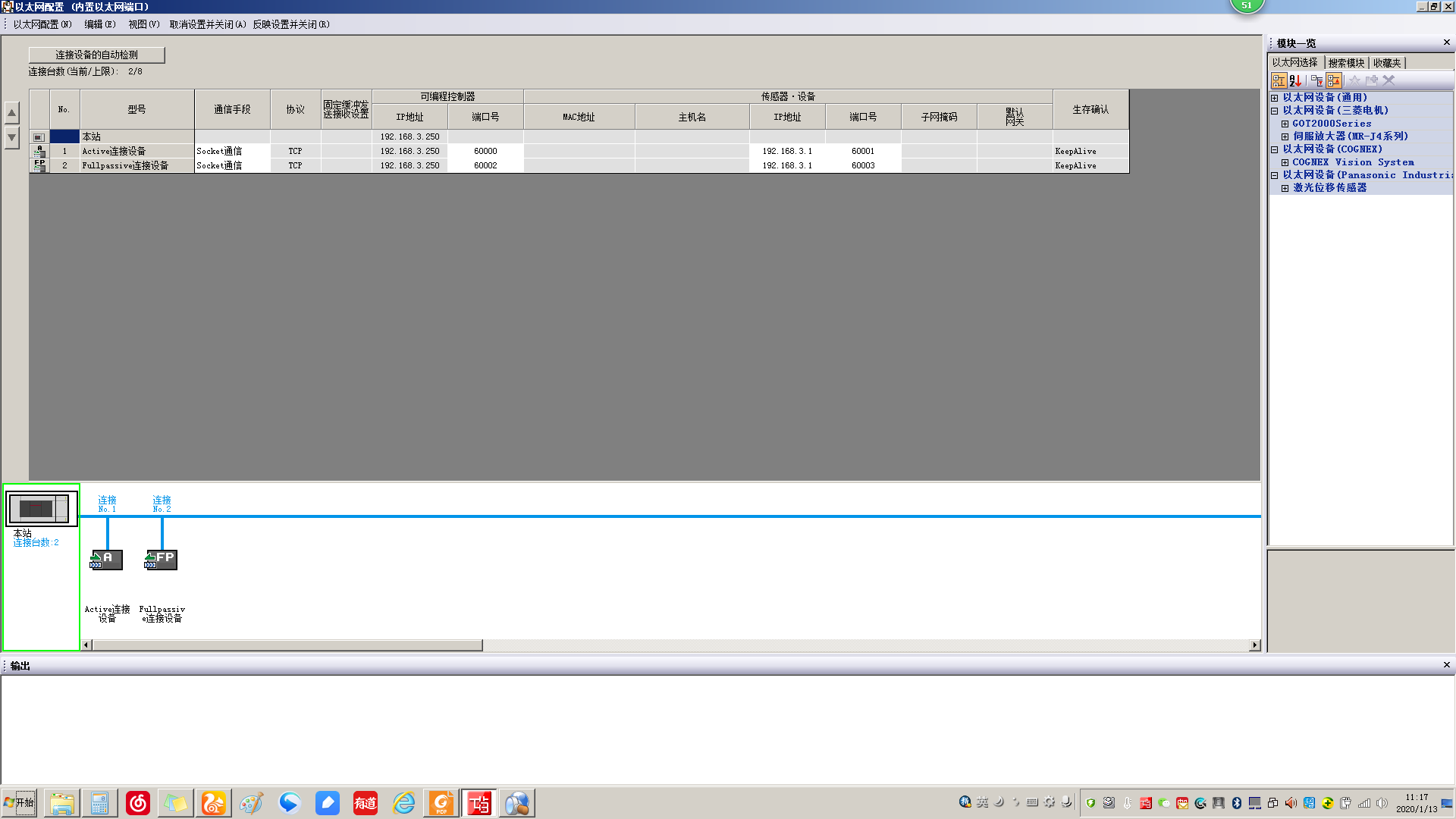
参数配置如图。
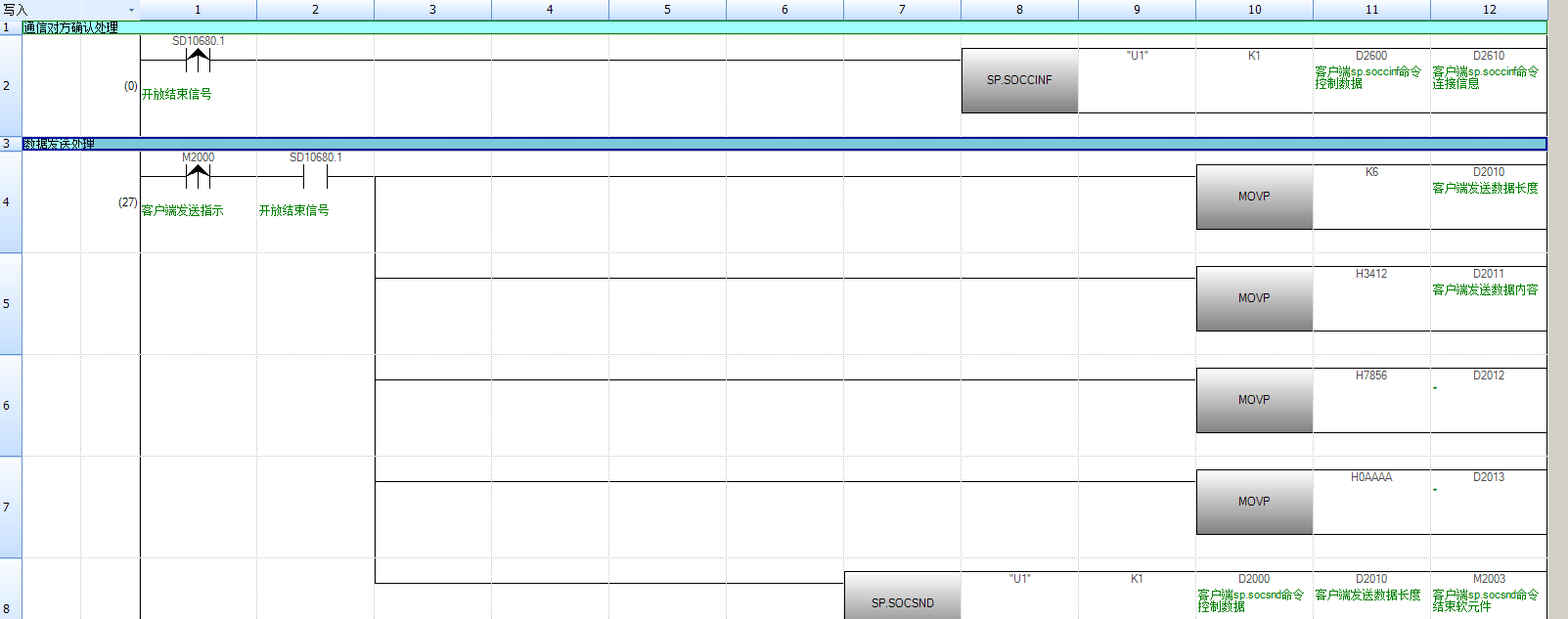
程序是手册里的例程。
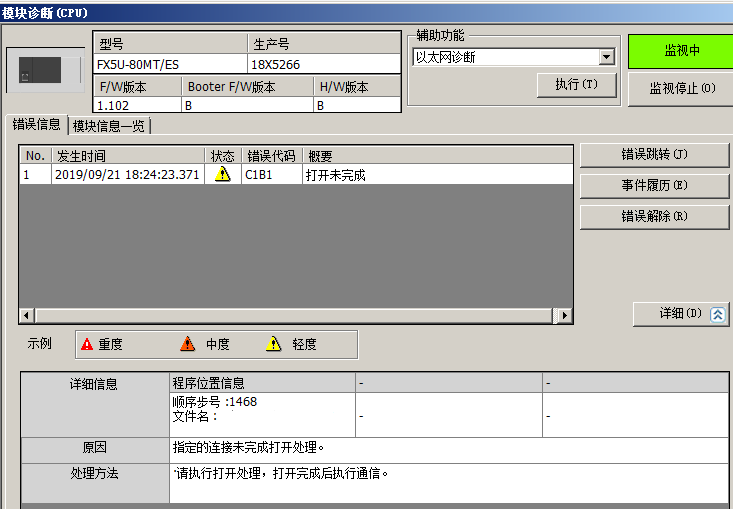
与no.2设备通信时,用调试助手发现可以连接得上,sd10680.1接通。
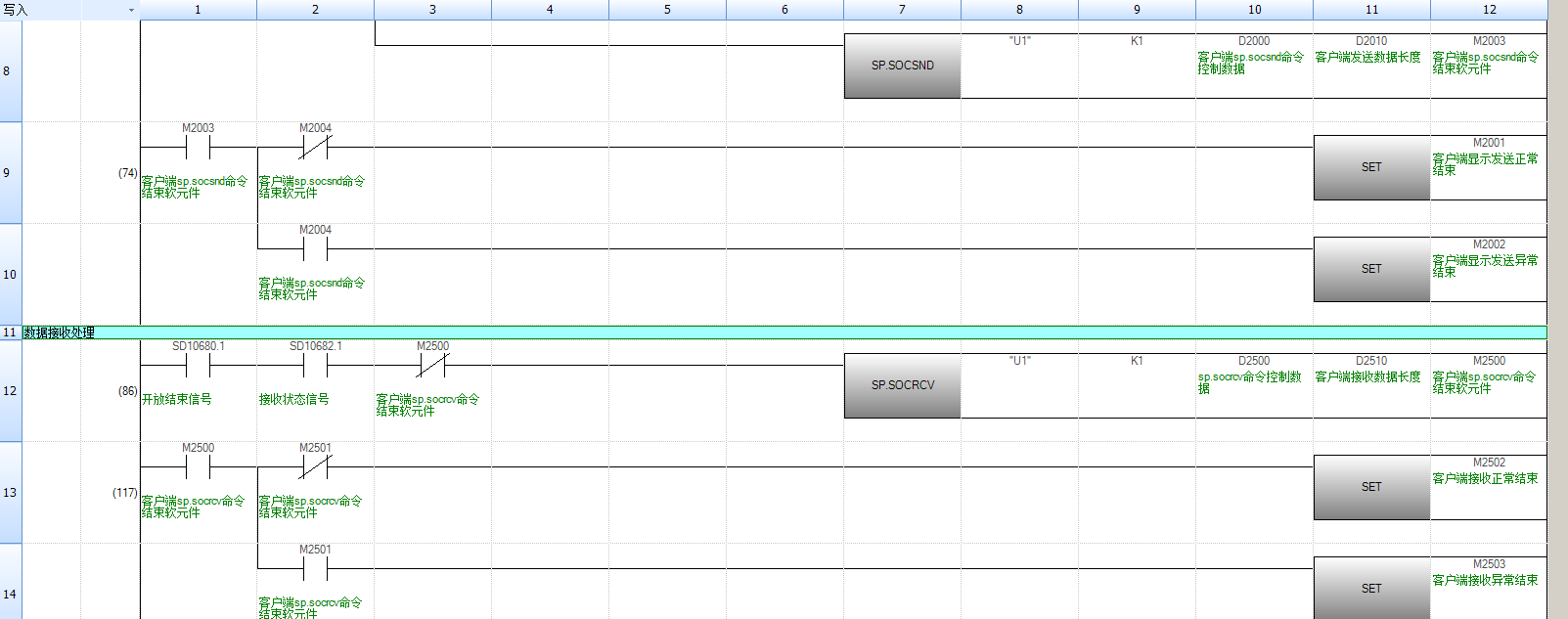
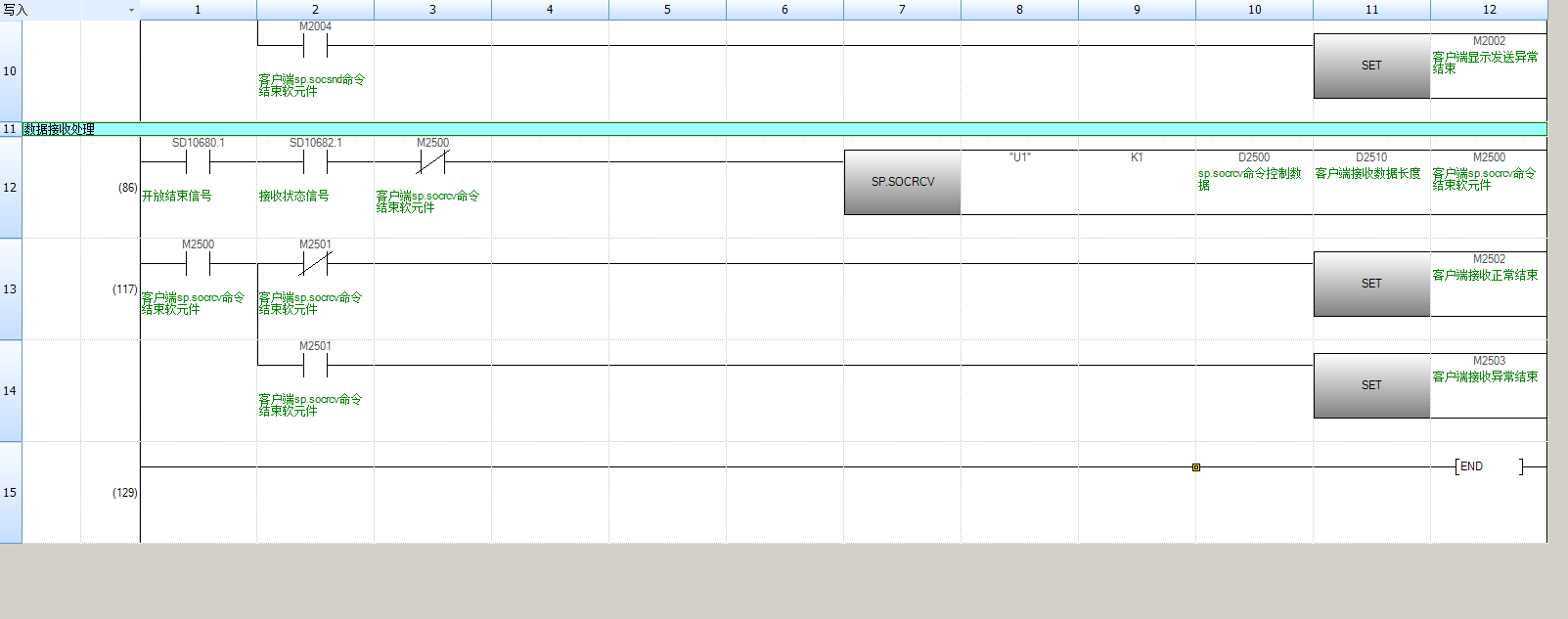
但是置位M2000发送时数据会出现c1b1的报警,接收也会出现c1b1报警。
手册里的内容,C1B1H 指定连接的开放处理未结束。 处理方法,进行开放处理,并在开放结束后进行通信。
plc作为服务器只是侦听,被动等待链接,不需要像客户端那样主动要求连接。
有个问题,上图参数配置中,plc与no.2设备连接时,plc是作为服务器,no.2设备是作为客户端吧?
20200114
no.2设备连接改为用unpassive方式,和调试助手连上了,无论收发都会出现上述报警。
终于找到问题了。还是自己没有仔细看好手册,没有对指令理解好。

上述指令通道2时应该选择k2,而不是k1,该参数的取值范围是从k1~k8。我一开始以为指令输入参数中的“u0”就可以表示通道了,其实这个也是错的。
为什么报错指定连接的开放处理未结束,其实就是我一直对通道1进行操作,而通道1中plc是作为客户端的,需要主动连接。
这也解释中间遇到其他因为这个错误而造成的现象。
1:中间遇到如果no.1设备连上后,那么与no.2设备进行连接后通信收发是不会报错的,no.1连上后,已经打开完成了,no.2程序中使用收发指令不会出现开放处理未结束报警。
2:当no.1和no.2都连上后,与no.2的数据发送都出现在no.1中。
感谢给予帮助的网友!
[ 此帖被勤工俭学在2020-01-14 10:47重新编辑 ]
 沪公网安备31010802001143号
沪公网安备31010802001143号

