分享一下研华MAS控制器的脚本编程方式,虽然跟PLC 梯行图有差异,但应该还是容易理解的.
复制代码- SUB MyRun '定义MyRun子程序
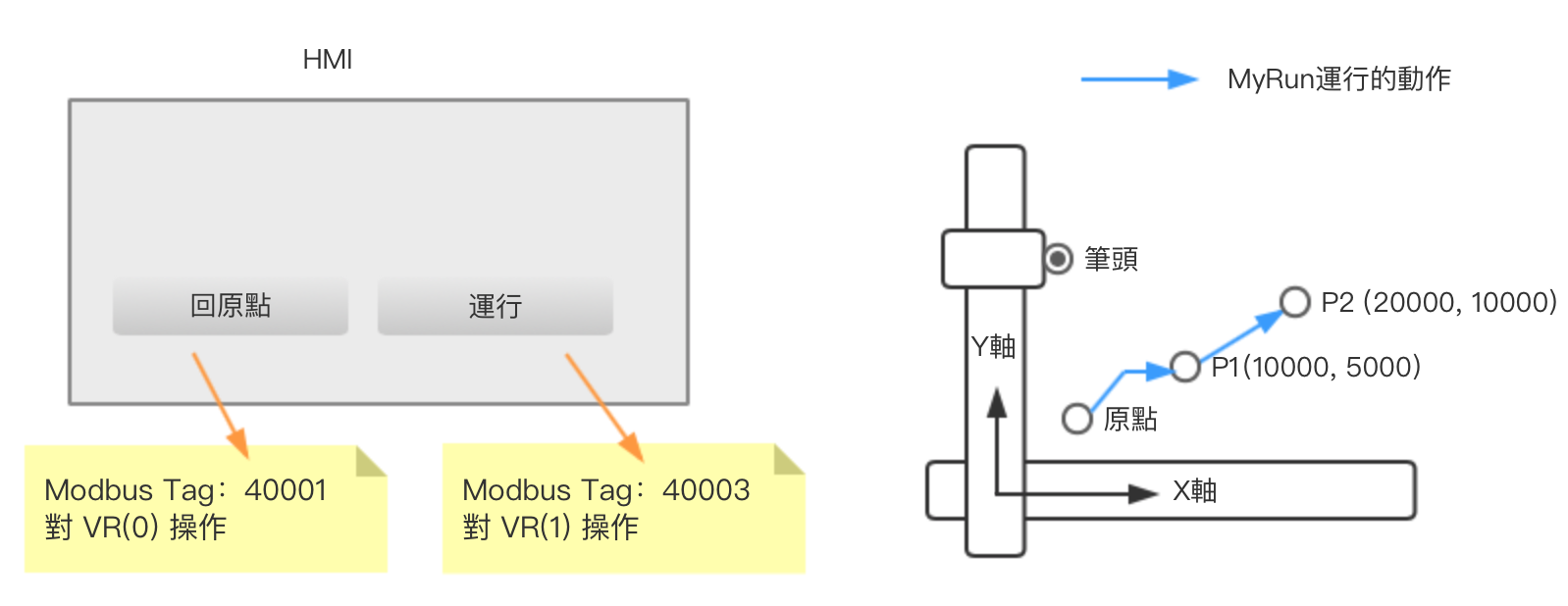
- BASE 0,1 '选择轴0,1
- MOVE 10000,5000 '相对移动到P1
- WAIT DONE '等待运动停止
- LINE 10000,5000 '相对移动到P2, (因为相对运动, 所以是 10000,5000)
- WAIT DONE '等待运动停止
- END SUB
-
- SUB MyHome '定义MyHome子程序
- BASE 0,1 '选择轴0,1
- MOVEABS 0,0 '绝对移动到0,0
- WAIT DONE '等待运动停止
- END SUB
-
- MS_LOOP(10) 'Task流程循环起始点
- IF MS_EDGER(VR(1)) THEN MyRun() 'VR(1)发生上升缘时,执行MyRun子程序
- IF MS_EDGER(VR(0)) THEN MyHome() 'VR(0)发生上升缘时,执行MyHome子程序
- MS_LEND 'Task流程循环结束点
- 使用到的指令:
- MS_LOOP… MSLEND TASK循环指令
- SUB … END SUB 定义子程序
- IF…THEN 条件判断式指令
- MS_EDGER 判断全域变数是否有上升缘发生
- VR(no) VR全域变数
- BASE 指定要操作的轴
- MOVEEABS 绝对运动到指定位置
- MOVE 相对运动到指定位置
|
 沪公网安备31010802001143号
沪公网安备31010802001143号

