很多新手会遇到这个问题,而且在刚入门的时候会觉得这是个大难题。我也曾经这样认为。毕竟这三样无一不是系统控制的大基础,不管是PLC,还是单片机,还是其他运动控制卡,等等模式,最终,只要你要控制伺服或者步进进行旋转,就必然要涉及到信号线的制作,驱动器参数的正确设置(往往看到说明书上的参数密密麻麻一大堆,不知道调哪个),以及脉冲与实际行程的比例或者说放大倍数(通俗的解释齿轮比的含义)。鉴于此,我们来慢慢、通俗的说下各种伺服以及步进的CN1端子(大部分都是CN1,即驱动器与PLC的信号连接)如何接线,以及要调整的参数。如果有错误的地方,还请大家批评指正啊。呵呵
以三菱mr-e-200a-kH003 这个型号的驱动器为例(随便找的个,其他牌子陆续跟上)。首先,要找到对应驱动器的说明书。详细的查看每一个环节,特别是驱动器与电机是否匹配。一般在驱动器说明书的前面都给了有匹配表。在驱动器参数设置里,也会有个匹配参数。
[attachments=81269]
一定要找到对应的匹配,否则驱动器无法识别伺服。还有个问题,就是大部分驱动器会自动检索电机并调整匹配参数,但有时候,比如接手的可能是混杂的旧驱动器与旧伺服,那你就最好找到一个参数,叫恢复出厂设置。把所有参数全部回到出厂状态,再从新一个一个调整。注意,不同驱动器有着不同的参数设置习惯。上电下电保存参数的先后顺序一定要搞清楚。
那么,这步做完后,其实先要做的是JOG测试。而不是急急忙忙的开始做信号线。就是把驱动器电源线接好,并连接到伺服;然后把编码器线接好也连接到伺服。找到驱动器说明书中的JOG测试参数。按照说明书指示步骤,进行JOG的正反转测试。可以适当调整速度。看正反转是否正常,并且运行是否流畅,有没有杂音,伺服没有发热抖动以及启动报警,驱动器散热风扇运转是否正常等,就说明你的驱动器与伺服匹配好了没,也得出了电源(电源线)、编码器(编码器线)、伺服跟驱动器都是不是好的结论。做完这步,就可以放心进行信号端子的接线工作了。
在实际工程中,你在选伺服的时候就应该考虑此工程是用那种控制模式来实现,具体到伺服的控制模式,往往也是新手迷惑的地方,比如位置控制模式,转矩控制模式,速度控制模式,全闭环控制模式,开环控制模式等等。再具体点,位置控制模式里有差分或者集电极开路等模式,有的伺服甚至分的更细,转矩与速度模式也有细分。面对如此多的模式,真是让人欲哭无泪,有种无从下手的感觉吧。呵呵。在这里我就不详细去解说各种模式的应用了。要想搞懂这些,先学下电工学电子电路学,再去家园等网站找资料吧。现在就以最普通的集电极开路位置控制模式来具体说下如何接线跟驱动器参数调节。
首先,你要找到驱动器说明书上的接线图。比如:
[attachments=81270]
[attachments=81271]
[attachments=81272]
其实,上面这张图对于一个刚入行的同行来说,照样是个难点。这么多符号,这么多端子,到底哪些才是我们需要的地。其实,驱动器说明书里都有专门列表,列出了常用端子的常用功能,比如:
[attachments=81291]
[attachments=81292]
当然。这个表只是个简易介绍表。后面还有更详细的功能说明表。由于参数太多。下面我就只列出基本的几个。
[attachments=81293]
[attachments=81294]
[attachments=81295]
[attachments=81296]
对于集电极开路呢,如果仅仅是发脉冲让伺服做绝对定位啊,相对定位啊什么的。其实就这么几个端子就够。
SON------接PLC输出点(Y7)
VIN--------DC24+
SG--------DC24-
PG--------接PLC的X轴脉冲输出(Y0)
PP--------1。2千欧(1/4瓦)电阻-------DC24-
NG--------接PLC的X轴方向输出(Y4)
NP1。2千欧(1/4瓦)电阻-------DC24-
由于有的驱动器内部提供有DC24+,那可以将内部24+输出与电源公共端直接焊起来。上述接线呢,就要实际动手去接,然后在PLC里随便写个发脉冲的指令,写个使能的指令。运行下就知道问题出在哪了。这里就不详细解释了。因为几乎所有伺服接线都大同小异,都是这几个基本端子啊。
关于电子齿轮比的计算,本来我还打算给你详细讲解下的,但我看到了高手(铭杰工控)更详细的解释,也是家园的牛B人物啊。我附加上地址,你自己看看吧。
http://www.ymmfa.com/read-gktid-143193.html那么,把通信线做好后连到PLC。并且测试用PLC发脉冲能运行了。就要仔细调节驱动器参数了。在这里我大致列举一下要调节的参数。
(1)控制模式(要选择你需要的模式,一般就是位置控制模式)
(2)SON使能机能选择(有的伺服提供了几种伺服使能模式)
(3)电机旋转方向设定(根据实际工程需要设定旋转正方向)
(4)负载惯量比(这个对于新手来说,开始就默认出厂设置,如果出现带负载运行对应某报警,可以适当调节它;有个帖子比较科学的阐述了如何计算,自己去看)
http://www.ymmfa.com/read-gktid-143723.html(5)刚性设定(这个是比较常调的,自己去摸索吧)
(6)脉冲型式(比如脉冲+符号,正转+反转,AB相等)
(7)脉冲逻辑(正逻辑,负逻辑)
(8)电子齿轮分子,电子齿轮分母
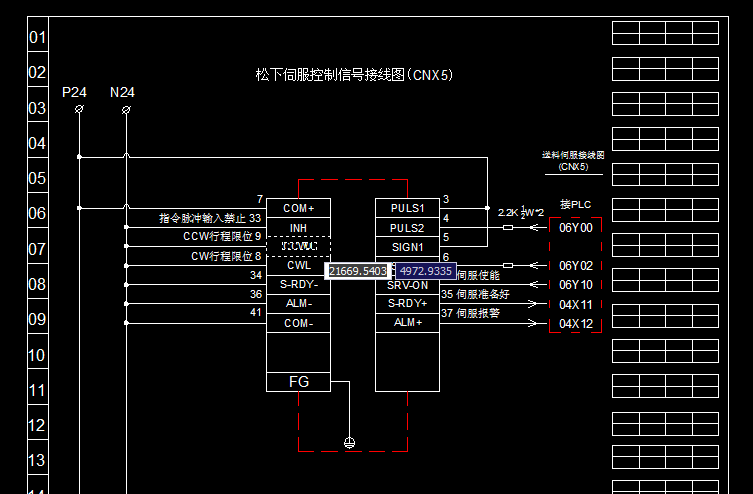
要说重要参数,就这些了。这里再附带一张松下A4伺服的接线图,也是家园某同仁提供的,也可以参考下。
[ 此帖被chinazhu6666在2012-04-02 10:16重新编辑 ]
 沪公网安备31010802001143号
沪公网安备31010802001143号

