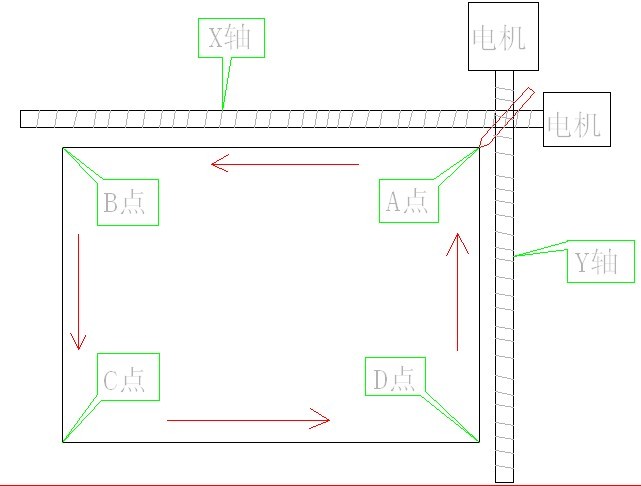
各位老师大家好!小弟从未接触过伺服,现我想用一台FX3UPLC控制两个ES系列(或J2系列)伺服控制一个焊枪,过程是:启动后X轴电机正转推动焊枪从A点(原点)到B点后停止,此时Y轴电机正转立即推动焊枪从B点到C点停止,此时X轴立即反转推动焊枪从C点到D点后停止,此时Y轴电机立即反转推动焊枪从D点到A点后停止,工作完成。工作过程中,在任何一个地方都可以暂停,重新启动后又可从原暂停点启动继续工作,工件绝对是一个长方形或正方形,现在我担心的是工作多次后会产生累积误差,怎样做到每次工作完成后焊枪都会回到A原点?用什么指令最好?(最好能给个该指令的样例),如用接近开关进行定位或机械定位我怕误差太大,误差最大只充许0.2个毫米,希望各位老师指导指导。谢谢!
[ 此帖被向钱冲在2012-05-05 20:30重新编辑 ]
 沪公网安备31010802001143号
沪公网安备31010802001143号

