1、首先是PLC的PNP输出和安川伺服的NPN输入的问题:
看论坛大部分的坛友都是说用光耦或者三极管把PNP的输出转换成NPN,但是,
安川的技术告诉我“直接反过来接,本来7脚接+24V,8脚接脉冲,改成7脚接脉冲,8脚接com,当然原来串接的2.2K电阻式少不了的”我不知道他这样说的对不对,
同时西门子的技术告诉我没办法实现,要么更改伺服驱动的输入形式,要么更换为CPU224XPSI,我提到转换的问题,他说不一定能保证波形,而且这也不属于他PLC范围的问题(指把PNP转换为NPN那部分电路)。
在网上查到说伺服驱动内部是双向光耦的话,可以不用区分正负,那这样的话是不是不论是PNP还是NPN都可以按照原来那种7脚接+24V,8脚接脉冲的方法来接呢
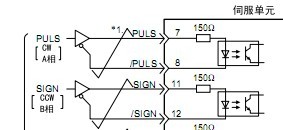
附安川接线图
2、位置控制定位指令部分
看手册、查坛友的发帖发现偏向于位控向导和MAP库,到我想实现的功能好像位控向导不好实现,不知道MAP库可以解决不,请大侠赐教,情况如下:
我是用CPU226控制2个变位机,是圆周运动不是丝杠,没有用EM253模块。Q0.0和Q0.1是脉冲输出,Q0.2和Q0.3分别为2个轴的方向。用位控向导的话,只能给Q0.0或者Q0.1设置一个向导。但是我在实际过程中,需要用到几段,比如说,第一次旋转90度,工作一段时间后可能需要再旋转60度,完成后再返回零位(初始位置)。
我的意思是用位控向导,在对Q0.0设定后,就决定了他的旋转角度,不可再继续添加关于Q0.0的向导了,用什么方法解决这个问题呢,只有自己编写指令了吗
 沪公网安备31010802001143号
沪公网安备31010802001143号

