图片:

图片:
图片:
图片:
图片:
图片:
图片:
图片:
图片:

图片:
图片:
PoliPLC是不一样的PLC。有着不一样的编程理念并且专注于机械自动化行业的应用。相对于传统的PLC,主要有如下优势。
Ø 提出了任务的概念,方便多任务编程。
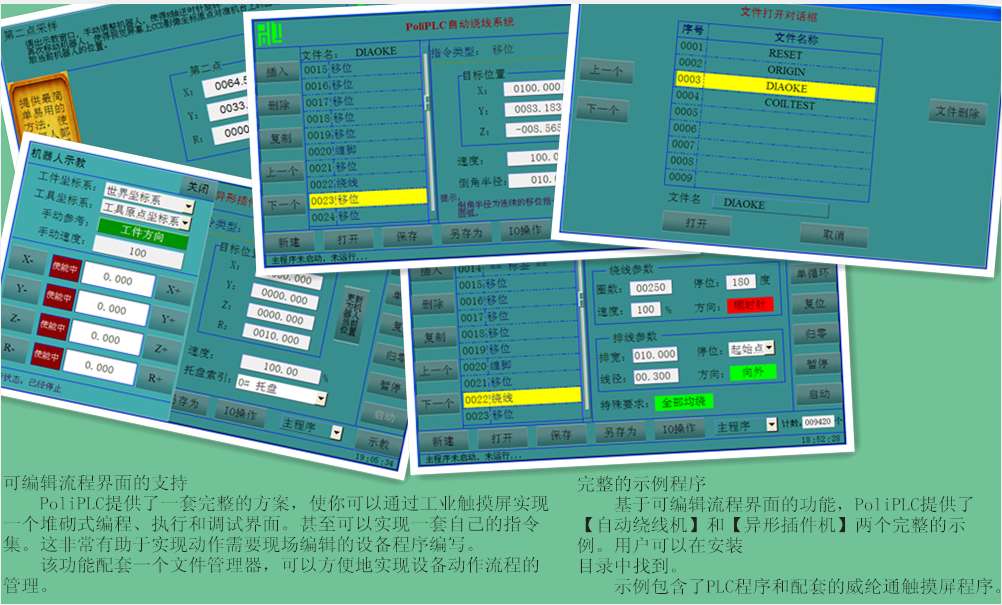
Ø 除了支持传统的梯形图编程之外,还支持了堆砌式的顺控型编程。梯形图程序可以和顺控型程序交替混合执行。我们知道,梯形图的优势在于可以直观的处理逻辑问题,而缺点是解决顺控问题时比较繁琐(尽管有了状态指令)。而顺控程序却可以很好的解决这个问题。利用梯形图所表示的扫描程序和顺控程序相结合的方式,可以比较完美的解决自动化编程中所遇到的各类问题。
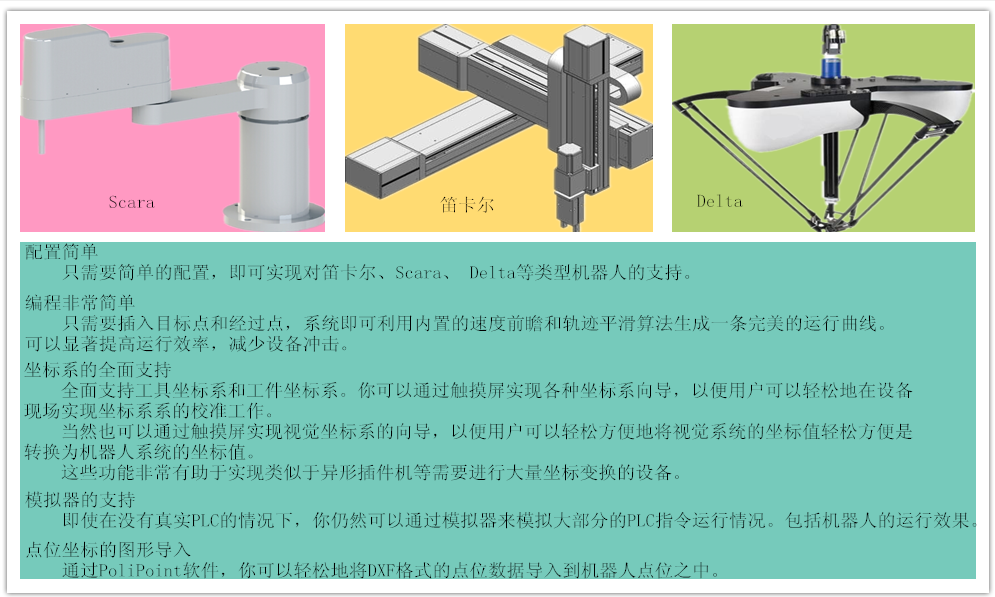
Ø 丰富的位置控制指令。
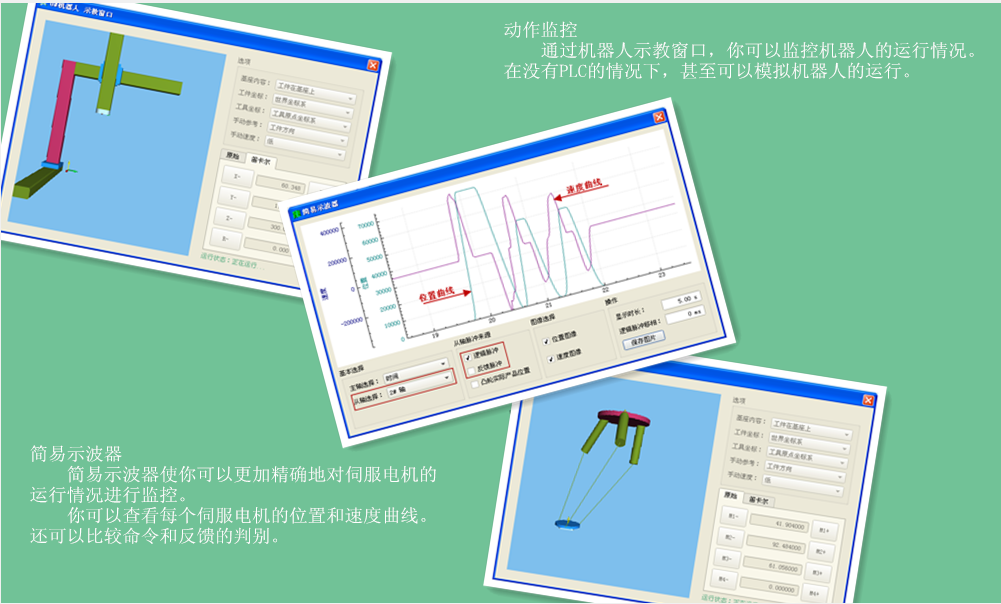
Ø PoliPLC F101提供了各种常见结构的四轴以下机器人的支持。对于大多数类型的四轴以下的机器人,我们都提供了灵活的支持方式。这样可以解决单纯的位置控制难以解决的问题,例如轨迹规划的问题。
Ø PoliPLC R101提供了各种常见结构的六轴机器人的支持。
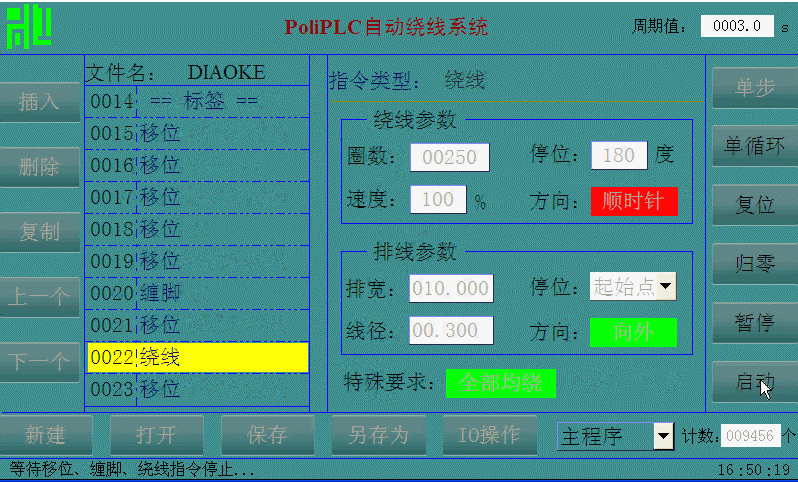
Ø PoliPLC C101提供了自动绕线机的支持。
Ø 完善的离线模拟和在线监控功能。使你在即便是没有PLC实体的时候也可以学习编程,并且模拟运行。
Ø 只需要设置而不需要编程(或者少量编程)就可以实现的暂停和恢复功能。
Ø 只需要少许设置就能够实现的程序各任务监视功能。这将大大提高设备的可监视性能,为设备的维护和故障查询提供最多的信息。
Ø 只需要少许设置就能够实现的超时报警功能。
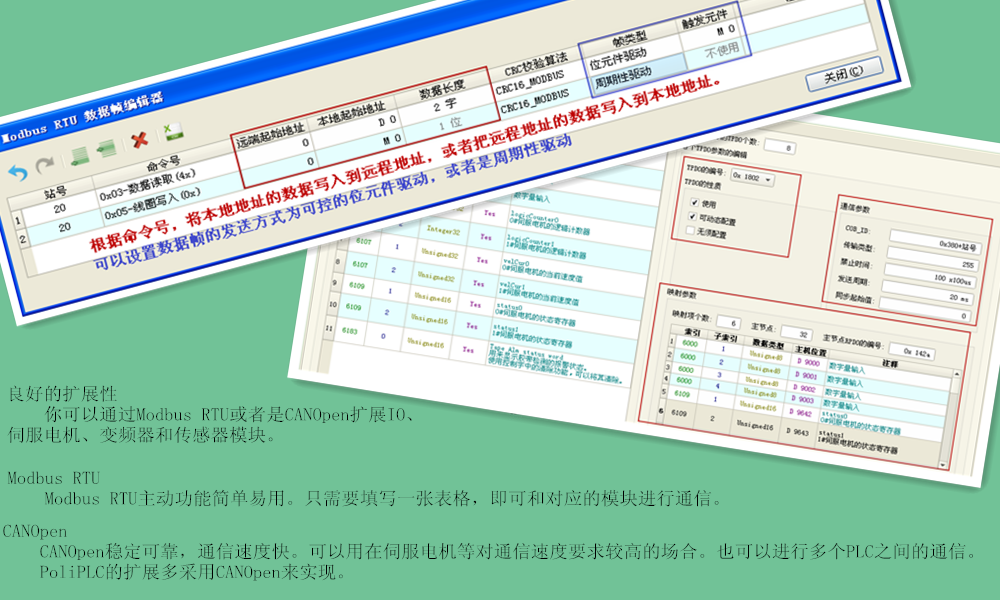
Ø 完善的Modbus通信支持。Modbus RTU从动协议可以连接触摸屏,进行程序和设备的监控和操作;Modbus RTU主动协议可以用来连接远程IO,变频器等;Modbus TCP从动协议也可以用来连接触摸屏,甚至可以实现远程调试、远程监控、远程系统程序升级、固件升级等功能。如果你能够编写手机程序,甚至可以实现在手机上通过Modbus TCP对设备运行情况的监视;或者如果你能够编写电脑程序的话,也可以通过ModbusTCP读取PoliPLC的运行数据连接到你公司的数据库中,从而实现全面的数据管理。
Ø CanOpen现场总线的支持。每一台PoliPLC既可以配置为CanOpen主节点,也可以配置为CanOpen从节点,从而实现多台PoliPLC连接成一个网络的功能;而且每个PoliPLC都能够扩展最多20个CanOpen总线型伺服电机(支持位置、速度、转矩、回原点模式)以及其它CanOpen从设备(不包含在20个之内);当总节点数多于110个时,可以通过网桥实现更多的节点连接。
 沪公网安备31010802001143号
沪公网安备31010802001143号

